Radar is an incredibly powerful tool for performing object detection and location for a variety of applications. Radar, which is an acronym for radio detection and ranging, uses electromagnetic waves (EW) within the radio frequency (RF) spectrum to detect, locate, track, and identify objects of interest on the ground or in the air over long ranges. At the most basic level, the EW signal is transmitted into the environment and the radar “listens” for a return signal, or echo. A return signal is generated when an object is in the path of the original signal, causing a reflected signal that bounces back to the receiver. It is often assumed that the object commonly referred to as a target, must be metal to reflect a radar signal, but it can be constructed of almost any type of material sufficiently different than the air that the radio wave is propagating through (plastic, rubber, glass, metal, wood, etc.). The time between the transmission of the original signal and reception of the return signal, which is known as time of flight, provides a significant amount of information about the detected object, including its location, distance, velocity, and characteristically unique features of motion which can be used to classify a target.
Since radar uses EWs that are pulsed and received rather than light waves or imaging technology, radar systems can accurately detect objects even under adverse weather and lighting conditions. Other common object detection and location technologies such as optical, infrared, and LiDAR-based sensing devices are significantly degraded. And even though radar is commonly confused with RF detection sensors because both devices detect EW signals, the way these two devices operate is quite different. Instead of sending out its own RF signals, RF sensors actively “listen” for RF signals emitted from other devices. Therefore, if an object is not emitting an RF signal, an RF sensor cannot detect that object (more on this in Part 3).

The basic concepts behind radar originated from electromagnetic radiation experiments performed by Heinrich Hertz in the late 1880s. While an early form of radar based on these concepts had limited use and functionality in the early 1900s, they were able to help sailors avoid ship collisions in inclement weather. In the 1930s, militaries became primary drivers of radar development with a focus on precision object detection. Fast-forward to today, and there is now a wide variety of sophisticated radar technology available for numerous detection applications.
Describing radar without the use case can be challenging, so the focus here is on radar for surveillance and security applications. In this context, and to make this complex discussion of radar much simpler, we’ll divide the types of radar into electronically scanning and mechanically scanning.
Radar can be further divided based on the way signals are transmitted and received – active versus passive. While active radar technologies will be the primary focus of this series, it is worth noting how passive radar works. Unlike an active radar, a passive radar does not have a dedicated transmitter that sends signals out for object detection. Instead, a passive radar is programmed to detect signals sent from third-party emitters - already working in the environment such as analog TV signals, FM radio signals, or digital audio and video signals. The receiver in a passive radar system can work in a variety of ways, but one way is to measure the time difference between the arrival of a signal directly from the transmitter and a signal arriving after it was sent by that transmitter and then reflected off an object. Passive radar has many excellent use cases but generally lacks the precision required when drones are the intruders.
As mentioned, an active radar works by sending out EW signals and listening for a return signal that is generated when the original signal makes contact with an object. But not all active radars are created equal. There are a variety of methods for sending and receiving signals that can impact the size, weight, power, and cost (SWaP-C) as well as the performance of the radar system. Let’s compare four common types of active radar.
One of the key differences between radars is how efficiently the radar transmits and receives signals. A rotating radar uses mechanical components to rotate a fixed radar beam in a complete circle (360 degrees). This severely limits the region of observation due to design compromises that must be made regarding the beam shape. In the security market this typically results in a product that is capable of only tracking slow moving air objects in a limited elevation (vertical) segment or is focused on slow moving ground objects. As an example, consider a rotating marine radar which only tracks objects on the water surface. The rotational speed also limits how often it is possible to get an update on an object’s position and therefore limits the number of possible targets and the positional accuracy that can be maintained. The fastest rotating radar rotates at 2 Hz, or 2 times per second. While rotating radars can produce very good data about movement in the airspace, the 2 Hz speed can often be too slow for maintaining optical lock or for targeting an intruder, which can slow or stop processes within an observe, orient, decide, act (OODA) loop.
An active electronically scanned array (AESA) uses high power to generate strong signals that are highly directional and can be steered in the airspace almost instantly without physically moving the antenna. This is historically accomplished by using an expensive array of transmit/receive phase control modules evenly positioned across the array surface at standard half-wavelength separation. The number of modules in the horizontal (azimuth) and vertical (elevation) direction across the array determines the beamwidth of the antenna. Each antenna element in the array is electronically controlled to configure the module to transmit and receive energy at a specific phase. When all the “N” signals are added in phase the direction of the beam is controlled as if the array physically moved. These modules with integrated phase shifters, transmitter, duplexing receiver are called T/R Modules. By using more T/R modules, the beam narrows and improves angular accuracy. The entire assembly of “N” phase-controlled T/R Modules is referred to as a Phased Array antenna. Since the beam can be electronically steered almost instantly to any position in the field of view many objects (aka targets) can be simultaneously detected and tracked.
However, using more T/R modules means higher acquisition and operational costs and generally larger arrays, so there is a big cost-performance tradeoff required when using an AESA. As a result, AESA style radars with high T/R module count (often numbering more than 300 to 1000) are mainly used for large detection arrays in high-performance military applications such as fighter jets, while low T/R AESAs have emerged as a lower-cost commercial option, but still have high SWaP and are costly to maintain given the construction complexity.

The recent development of the metamaterial ESA (MESA®) marks a significant recent advancement in radar technology. Using standard materials in a unique design, a MESA radar offers the performance benefits of an AESA without the complex mechanical limitations of traditional designs. Using commercial PCB fabrication and standard surface mount assembly techniques it is now possible to significantly reduce upfront equipment costs, maintenance costs, and overall system SWaP requirements. A phased array radar without hundreds of T/R Module phase shifters enables a range of features and functionality very similar to those advanced military designs but with the primary benefit of producing narrow beams under electronic control while only utilizing a single transmit receive module for the entire array. The metamaterial design process is scalable technically and in manufacturing to meet a wide variety of needs.
It is also important to distinguish MESA radar from some of the other commercial off-the-shelf (COTS) radar options emerging today. Most active COTS radar options are two dimensional, so the radar beam only covers a narrow elevation of <20 degrees. And in the few examples of COTS radar with high elevation coverage, they tend to lack range and precision. Many of these radars are designed for surveillance of perimeters where fence lines, obstructions, and gates with guards would dissuade intruders. MESA is a rare, fundamental breakthrough in antenna design that creates a three-dimensional radar with a very large field of view (120° x 80°, 130° x 90°). Perhaps more importantly though, MESA radar is a COTS option designed for surveillance of both the airspace and the ground. Additionally, other three-dimensional radars, like the AESAs mentioned above, may not be capable of adapting to detecting small objects, such as drones, yet even if these could, the system would still have the SWaP-C burden.
The table below shows a side-by-side comparison of the SWaP-C and performance of these four types of active radar when used for airspace situational awareness for a counter-uncrewed aircraft system (C-UAS) application.

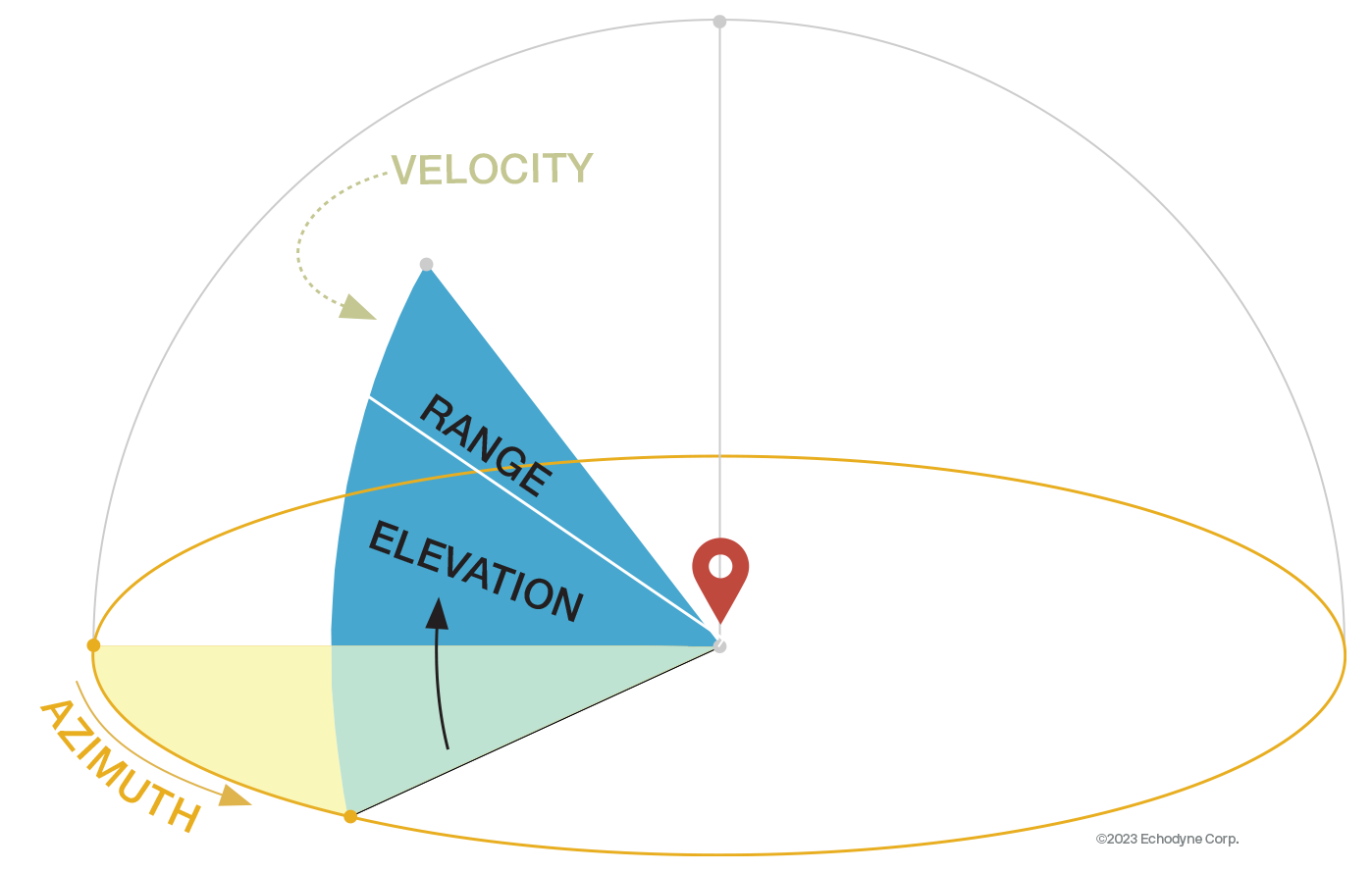
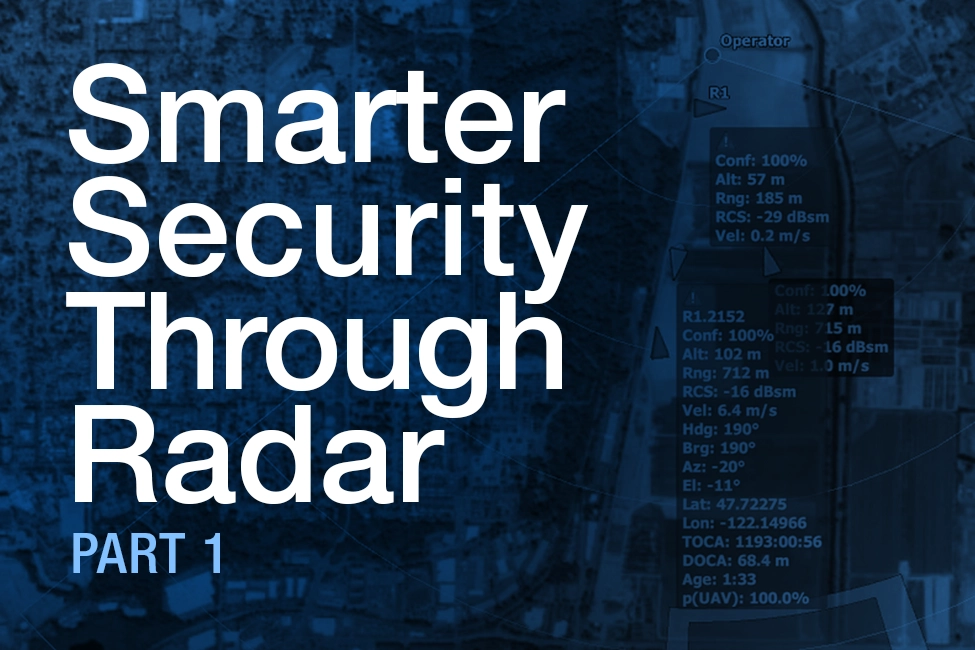
Radar is only as good as the data it conveys to the user. If the radar receives incomplete, unclear, non-actionable data, the available system data is just a dot on a map that conveys nothing but anxiety. To understand what a radar can, and should, convey, it is important to understand the following four data dimensions of radar:
Since an object in the path of the radio signal will cause a reflection, and that signal will bounce back to the radar’s receiver, it is the return signal that contains a wealth of data about the target including the following:
Additionally, a radar is generally programmed to search its entire field of view at a regular interval, such as every second. If an object is detected, it forms a track that then gets regularly measured with multiple beams over the course of a few seconds. This will generate different reflections on the return signals, which will help determine both velocity and direction of the object. Using this information, the object’s movement toward or away from the radar, can also be determined. Echodyne radars provide TOCA (Time of Closest Approach) and DOCA (Distance of Closest Approach) in track packets to user systems which is highly valuable for prioritizing target threats. In other words, the radar reports which targets will come closest to your position and which target threats will arrive the soonest.